<Письмо> Минобрнауки России от 18.08.2015 N АК-2290/06
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
ПИСЬМО
от 18 августа 2015 г. N АК-2290/06
О НАПРАВЛЕНИИ МЕТОДИЧЕСКИХ РЕКОМЕНДАЦИЙ
Минобрнауки России в целях оказания методической помощи организациям, реализующим программы профессионального обучения водителей транспортных средств соответствующих категорий и подкатегорий, направляет методические рекомендации по разработке методики и технического средства контроля эффективности, безопасности и экологичности вождения в условиях дорожного движения и рекомендаций по их применению для профессионального обучения водителей транспортных средств различных категорий и подкатегорий.
Рекомендуем прилагаемые методические рекомендации довести до сведения организаций, осуществляющих образовательную деятельность по программам профессионального обучения водителей транспортных средств, на территории субъекта Российской Федерации.
А.А.КЛИМОВ
Приложение
МЕТОДИЧЕСКИЕ РЕКОМЕНДАЦИИ
ПО РАЗРАБОТКЕ МЕТОДИКИ И ТЕХНИЧЕСКОГО СРЕДСТВА
КОНТРОЛЯ ЭФФЕКТИВНОСТИ, БЕЗОПАСНОСТИ И ЭКОЛОГИЧНОСТИ
ВОЖДЕНИЯ В УСЛОВИЯХ ДОРОЖНОГО ДВИЖЕНИЯ И РЕКОМЕНДАЦИЙ
ПО ИХ ПРИМЕНЕНИЮ ДЛЯ ПРОФЕССИОНАЛЬНОГО ОБУЧЕНИЯ ВОДИТЕЛЕЙ
ТРАНСПОРТНЫХ СРЕДСТВ РАЗЛИЧНЫХ КАТЕГОРИЙ И ПОДКАТЕГОРИЙ
1. Разработка на базе теории управления
автомобилем перечня показателей, характеризующих качество
управления автомобилем
1.1. Цели и задачи управления автомобилем
Дорожное движение возникло для удовлетворения потребностей общества в перемещении людей и грузов. Управление автомобилем, управление дорожным движением являются разновидностями деятельности человека, цель которой - перемещение из одной в другую точку пространства [1]. Оптимизация деятельности водителя возможна только по критерию эффективности достижения цели [2]. Активная безопасность дорожного движения является не целью, а условием ее достижения. Если бы мы попытались оптимизировать управление дорожным движением по критерию активной безопасности, то могли бы быстро достичь цели - остановив движение. Этого не происходит потому, что подсознательно все понимают невозможность такой оптимизации. Однако то, что мы занимаемся не повышением качества дорожного движения, а повышением его безопасности, снижает эффективность проводимых мероприятий. Очень точно об этом сказал известный австрийский специалист в области транспортной психологии Д. Клебельсберг [3]: "Наименее эффективны прямые призывы к безопасности потому, что никто не вступает в дорожное движение, чтобы бороться с опасностями, а только для того чтобы попасть из пункта A в пункт B. Поэтому полезнее показать низкую эффективность попыток повысить среднюю скорость путем реализации модели поведения гонщика при движении в транспортном потоке".
Можно возразить: "Что же плохого в акцентировании внимания водителя на безопасном управлении автомобилем"? А происходит следующее. Водитель садится за руль автомобиля, чтобы эффективнее достичь цели перемещения. Поэтому, когда мы не даем ему модель эффективного управления автомобилем, то он формирует ее сам. Наиболее простой и понятной является модель поведения гонщика: "чем быстрее едешь, тем быстрее приедешь". При этом упускается из вида то, что у гонщика и водителя различные цели и задачи. Целью гонщика является занятие как можно более высокого места среди всех, участвующих в гонках. Опережение другого гонщика даже на тысячные доли секунды повышает эффективность достижения цели. Поэтому гонщик ставит перед собой задачу движения с максимально-возможной скоростью на каждом отрезке трассы соревнований.
Для водителя, участвующего в дорожном движении, критерии эффективности другие. Выигрыш минут и, тем более, секунд не повышает эффективности управления автомобилем. Поэтому водитель ставит перед собой задачу доехать до пункта назначения с оптимальной скоростью, позволяющей израсходовать как можно меньше топлива, ресурса автомобиля и собственного ресурса. К сказанному следует добавить то, о чем говорил Клебельсберг. В транспортном потоке при повышении скорости до максимально возможной каждый раз, когда дорожные условия позволяют это - не означает, что средняя скорость автомобиля будет так же увеличиваться.
1.2. Условия эффективного управления автомобилем
при движении по дорогам общего пользования
Рассмотрим задачу повышения эффективности управления автомобилем при движении в транспортном потоке более подробно. На рис. 1 приведен график изменения средней скорости сообщения Vс легкового автомобиля с конструктивной скоростью 160 км/ч в зависимости от максимальной скорости Vmax, до которой при наличии возможности разгоняется автомобиль на двухполосной дороге при различных уровнях удобства движения в транспортном потоке [4].
Уровень удобства движения определяется тем, насколько свободно водитель может выбирать скорость. Различают шесть уровней удобства движения: A - свободный транспортный поток, водитель может свободно выбирать скорость, практически все обгоны можно выполнять с хода, средняя дистанция между автомобилями - 20 с. и более;
B - частично связанный транспортный поток, водитель ограничен в выборе скорости, но может выбрать скорость, которая позволяет двигаться продолжительное время, не меняя ее, значительная часть обгонов выполняется с ожиданием, средняя дистанция - от 20 до 10 с.; C - связанный стационарный транспортный поток, водитель вынужден двигаться со скоростью транспортного потока, которая является достаточно стабильной, обгоны возможны только после длительного ожидания, - средняя дистанция от 10 до 6 с.; D - связанный нестационарный транспортный поток, движение возможно только со скоростью транспортного потока, которая является нестабильной, обгоны возможны только с нарушением ПДД, средняя дистанция - от 6 до 4 с.; E - насыщенный транспортный поток, движение возможно только со скоростью транспортного потока, которая систематически изменяется, обгоны возможны только с грубым нарушением ПДД, - средняя дистанция от 4 до 2 с; F - неустойчивый транспортный поток, маневрирование в потоке невозможно, скорость потока периодически снижается до нуля, и возможны заторы.
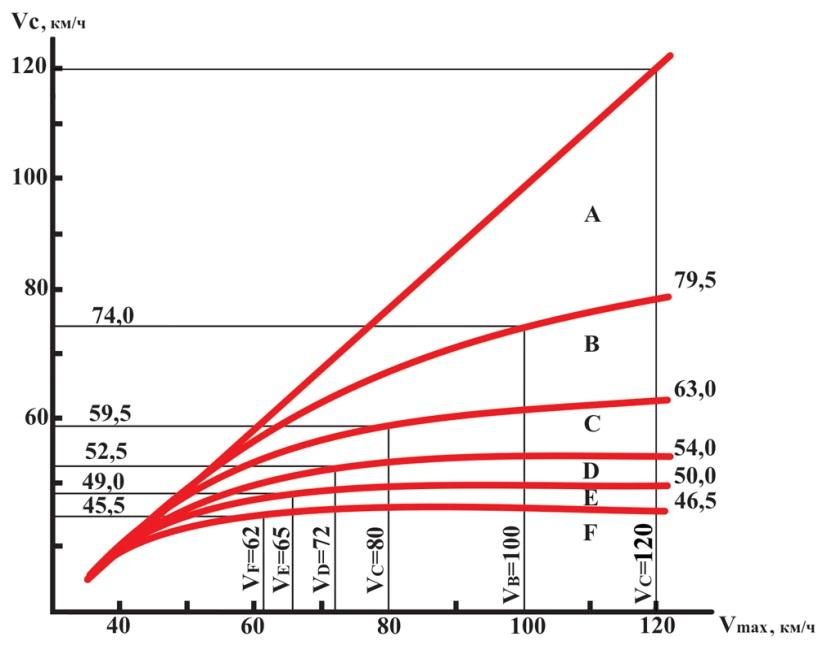
Рис. 1 - Зависимость средней скорости сообщения Vс от максимальной скорости на участках свободного движения Vmax при движении легкового автомобиля с конструктивной скоростью 160 км/ч по двухполосной дороге при различных уровнях удобства движения:
A - свободный транспортный поток; B - частично связанный транспортный поток; C - связанный стационарный транспортный поток; D - связанный нестационарный транспортный поток; E - насыщенный транспортный поток; F - неустойчивый транспортный поток
Приведенное описание уровней удобства движения в транспортном потоке относится к движению по шоссе, когда на большом протяжении пути отсутствуют равнозначные и регулируемые перекрестки. В городе возникновение свободного транспортного потока невозможно, поскольку даже одиночный автомобиль должен останавливаться на запрещающий сигнал светофора, пропускать транспорт, движущийся по главной дороге, пешеходов на переходе типа зебра.
Как можно видеть из графика на рис. 1, чем ниже уровень удобства движения, тем медленнее увеличивается скорость сообщения Vс при повышении максимальной скорости Vmax. После увеличения максимальной скорости до определенной величины, скорость сообщения перестает расти. И чем ниже уровень удобства движения, тем меньше эта максимальная скорость.
Если при движении в транспортном потоке с уровнем удобства ниже свободного, водитель пытается повысить среднюю скорость сообщения Vс, увеличение максимальной скорости на участках свободного движения и последующие торможения, вызываемые необходимостью ожидать очередную возможность обгона, приводит к повышению расхода топлива.
Расход топлива будет так же увеличиваться, если водитель будет разгоняться до постоянной максимальной скорости при снижении уровня удобства движения. Это означает, что при снижении уровня удобства движения в транспортном потоке необходимо уменьшать максимальную скорость автомобиля на участках свободного движения.
Комплексным показателем эффективности управления автомобилем является отношение скорости сообщения Vс к расходу топлива qs. Этот показатель называется коэффициентом преобразования топлива в скорость kqv:
kqv = Vс / qs, 100 км2/ч*л (1)
Физический смысл kqv следующий: его величина равна скорости сообщения, которую создает один литр топлива, израсходованный на 100 км пути. Его значение сначала увеличивается (скорость растет быстрее, чем расход топлива), а затем начинает уменьшаться (скорость растет медленнее, чем расход топлива).
Максимальному значению kqv при движении на высшей передаче с постоянной скоростью соответствует эффективная скорость Vэ. Для легковых автомобилей ее величина изменяется в диапазоне от 100 до 120 км/ч в зависимости от топливно-скоростных свойств автомобиля. Для грузовых автомобилей величина Vэ изменяется в диапазоне от 70 до 90 км/ч. При переходе на низшие передачи во время движения с постоянной скоростью kqv уменьшается обратно пропорционально увеличению передаточного отношения.
При движении с переменной скоростью kqv уменьшается по отношению к его величине при постоянной скорости тем больше, чем выше неравномерность движения автомобиля.
На основании изложенного можно сформулировать модель поведения водителя в транспортном потоке, реализация которой приводит к повышению эффективности управления автомобилем: в свободном транспортном потоке максимальная скорость не должна превышать Vэ; при снижении уровня удобства движения для замедления процесса уменьшения kqv необходимо ограничивать максимальную скорость на участках свободного движения тем больше, чем ниже уровень удобства движения. Для каждого уровня удобства движения и для каждой категории транспортных средств существуют оптимальные максимальные скорости, обеспечивающие движение с оптимальной скоростью сообщения Vс.опт, которая равна наиболее вероятной скорости транспортного потока (при наличии в потоке ТС различных категорий - наиболее вероятной скорости движения ТС своей категории). На рис. 1 значения максимальных скоростей, обеспечивающих движение с оптимальными скоростями сообщения Vс.опт, в транспортных потоках с уровнями удобства движения B, C, D, E, F, обозначены: VB, VC, VD, VE, VF. При этом скорость сообщения уменьшается незначительно (по сравнению со скоростью, достигаемой при реализации модели поведения гонщика) и тем меньше, чем ниже уровень удобства движения. Из изложенного следует:
- мастерство водителя при движении в транспортном потоке определяется его умением ограничивать максимальную скорость до такого значения, при котором скорость сообщения будет оптимальной Vс.опт, равной наиболее вероятной скорости транспортного потока;
- повышение эффективности управления автомобилем (увеличение коэффициента преобразования топлива в скорость kqv) возможно только за счет снижения расхода топлива. Поэтому попытки водителя повысить скорость сообщения относительно ее оптимального значения, путем реализации модели поведения гонщика, говорят о его низкой квалификации.
Чтобы эффективно управлять автомобилем водителю, необходимо знать, как он должен двигаться к этой цели - знать и уметь применять модель оптимального поведения в транспортном потоке, приведенную ниже.
Модель оптимального поведения водителя в транспортном потоке
- разгон при встраивании в транспортный поток и его пересечении, обгоне автомобилей - с необходимой для обеспечения безопасности интенсивностью;
- крейсерская скорость - по возможности равномерное движение со скоростью транспортного потока;
- максимальная скорость в свободном транспортном потоке - эффективная скорость Vэ, но не больше разрешенной скорости плюс 10 км/ч.
- ограничение максимальной скорости на участках свободного движения по сравнению с разрешенной при снижении уровня удобства движения;
- плавное снижение скорости путем применения наката и торможения двигателем;
- дистанция - не менее 3...4 с, когда лидер ТС той же категории, 4...5 с, когда лидер ТС более низкой категории.
- обгон - только тихоходных автомобилей, "выпадающих" из транспортного потока;
- смена полосы только при необходимости совершить поворот, опередить "тихоходный" автомобиль.
Экономичный алгоритм управления автомобилем задает при разгоне положение педали скорости и частоту вращения коленчатого вала в момент перехода на высшие передачи; задает передачу при установившемся движении в зависимости от скорости [4], [5]. Для каждой модели автомобиля имеется свой экономичный алгоритм управления.
Чтобы добиваться максимальной эффективности управления автомобилем, водителю необходима информация обратной связи, о том, насколько успешно он решает задачу. Такой информацией являются:
- скорость сообщения Vс;
- путевой расход топлива в сравнении с нормативным его значением.
1.3. Условия безопасного управления автомобилем
при движении по дорогам общего пользования
Чтобы безопасно управлять автомобилем, необходимо понять причины возникновения ДТП, которое происходит тогда, когда система водитель-автомобиль не может выполнить маневр, предписанный сложившейся дорожно-транспортной ситуацией. В результате происходит дорожно-транспортное происшествие одного из возможных типов: наезд на препятствие, съезд с дороги, столкновение с другими ТС, опрокидывание на дороге в процессе выполнения маневра. На рис. 2 приведены графики надежности выполнения маневров: при его постоянных геометрических параметрах и изменении скорости выполнения; при постоянной скорости и изменении геометрических параметров маневра (верхний ряд графиков) [6]. Ниже приведены графики опасного (средние графики) и безопасного (нижние графики) распределения скоростей движения в транспортном потоке. Рассмотрим приведенные графики.
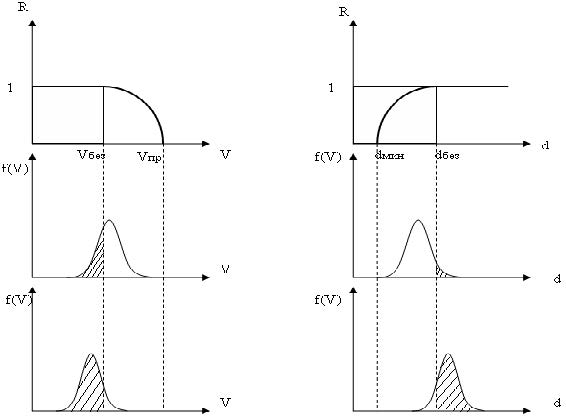
Рис. 2 - Графики изменения надежности выполнения маневров в зависимости от скорости (слева) и в зависимости от дистанции (справа), опасного (средние графики) и безопасного (нижние графики) распределения скоростей в транспортном потоке
Как можно видеть из представленных на рис. 2 графиков безопасной скоростью является ее наибольшее значение Vбез, при превышении которого надежность выполнения маневра становится меньше единицы, а безопасной дистанцией dбез - наименьшее ее значение, при уменьшении относительно
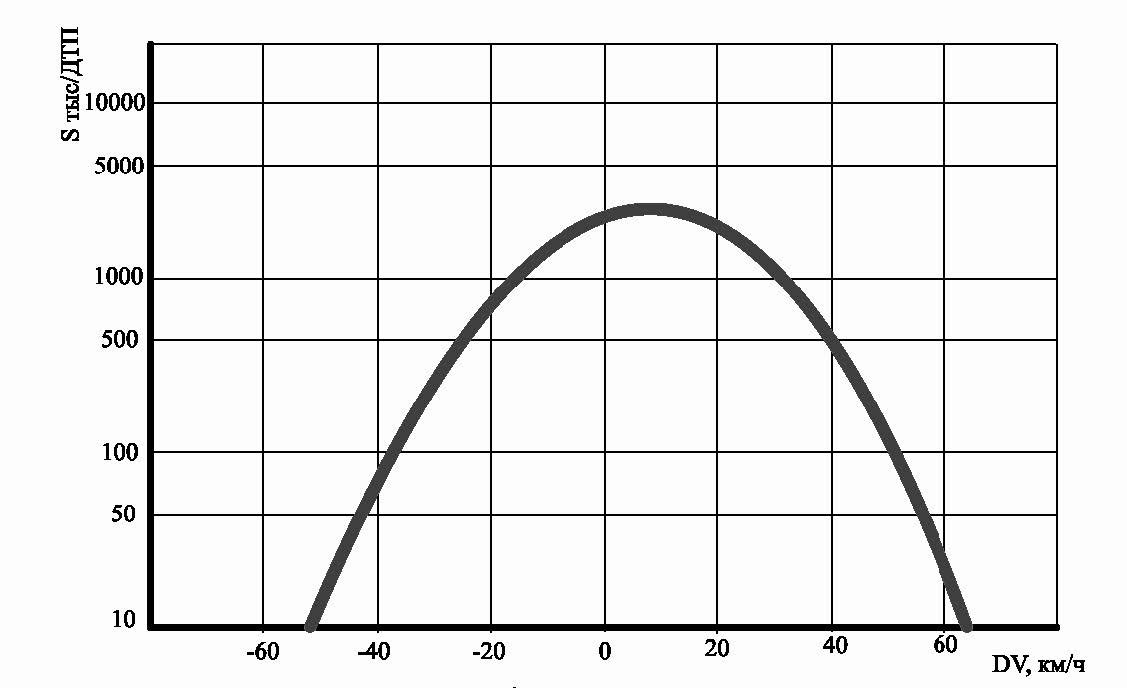
Рис. 3 - Изменение средней наработки на ДТП SДТП в зависимости от отклонения скорости автомобиля от наиболее вероятной скорости транспортного потока DV
ДТП по вине водителя не произойдет, если скорость будет не больше, а дистанция не меньше Vбез и dбез соответственно. На средних и нижних штриховкой показана доля систем водитель-автомобиль, по вине которых ДТП не может произойти. Из приведенных графиков видно, что для повышения активной безопасности дорожного движения необходимо уменьшить долю водителей, которые превышают Vбез и уменьшают дистанцию относительно dбез. Однако опасность представляют не только те водители, которые превышают Vбез. На рис. 3 приведен график изменения средней наработки на ДТП SДТП в зависимости от отклонения скорости автомобиля от наиболее вероятной скорости транспортного потока [5].
Как можно видеть из представленного на рис. 3 графика, уменьшение скорости автомобиля относительно скорости транспортного потока так же опасно, как и ее превышение.
Водитель так же управляет траекторией движения автомобиля, обеспечивая безопасные значения бокового интервала. С учетом изложенного можно сформулировать условия безопасного управления автомобилем:
- в любой дорожно-транспортной ситуации скорость не должна быть больше, а дистанция и боковой интервал - меньше безопасных значений;
- при этом скорость должна быть не меньше, а боковой интервал не больше значений, при которых автомобиль будет создавать помехи для других участников движения, в результате которых их скорость окажется больше, а дистанция и боковой интервал - меньше безопасных значений.
Безопасные значения скорости, дистанции и бокового интервала определяют положение границ безопасного управления. Значения скорости, которую нельзя превышать, дистанции и бокового интервала, которые нельзя занижать, определяют положение внешней границы безопасного управления.
Значения скорости, которую нельзя занижать и бокового интервала, который нельзя завышать, чтобы не создавать помех другим участникам движения, определяют положение внутренней границы безопасного управления.
Переход через границы безопасного управления означает, что водитель стал участником игры в автомобильную рулетку и быть или не быть ДТП с этого момента определяет случай. Чем дальше отклоняются от границы безопасного управления скорость, дистанция и боковой интервал, тем выше вероятность ДТП [6].
Повышение свойств транспортного средства, ошибочно называемых свойствами активной безопасности (скоростных, тормозных, устойчивости против бокового скольжения и опрокидывания) и улучшение дорожных условий не повышает безопасность управления автомобилем, а только изменяет положение границ безопасного управления, позволяя ездить безопасно с более высокой скоростью в свободном транспортном потоке.
Повышенный уровень аварийности среди начинающих водителей означает, что мы допускаем к участию в дорожном движении водителей, не умеющих управлять автомобилем, оставаясь в границах безопасного управления. Низкий уровень безопасности дорожного движения означает, что большое количеством водителей, достигших своего "потолка" в умении управлять автомобилем, так и не научились делать это, не переходя границ безопасного управления.
Возникает естественный вопрос: "Что мешает водителям оставаться в границах безопасного управления"? Основной причиной этого является отсутствие у водителей объективной информации о положении этих границ. Безопасные значения скорости, дистанции и бокового интервала водители оценивают субъективно, с ошибкой. Ее знак и величина зависят от их опыта и социально-психологических качеств.
На основании изложенного, обучение вождению автомобиля и последующее управление им можно сравнить с обучением, тренировкой и проведением соревнований по прыжкам в высоту без планки. При обучении, инструктор, оценивающий положение границ безопасного управления с ошибкой, формирует у обучаемого начальные представления об их положении. Экзаменатор, допускающий к участию в дорожном движении кандидатов в водители, не умеющих управлять автомобилем, оставаясь в границах безопасного управления, так же оценивает положение этих границ с ошибкой. Начинающий водитель уточняет свои представления о положении границ безопасного управления, сформированные в период обучения, по мере приобретения опыта. Будет этот опыт положительным или отрицательным зависит от набора социально-психологических качеств водителя.
Если набор этих качеств способствует занижению безопасной скорости и завышению безопасных значений дистанции и бокового интервала, с приобретением опыта повышается точность оценок и формируется безопасное поведение водителя в дорожном движении. Когда начинающий водитель обладает набором качеств, способствующих завышению безопасной скорости и занижению безопасных значений дистанции и бокового интервала, происходит отрицательное обучение - закрепление этих ошибочных представлений.
Происходит это потому, что вероятность ДТП при переходе границ безопасного управления является редким событием по сравнению с событием перехода границ безопасного управления. На одно неучетное ДТП приходится, в среднем, 1000 критических случаев перехода границ безопасного управления, а на одно учетное ДТП - 8000 таких случаев [5]. Из тех, кто склонен завышать безопасную скорость и занижать дистанцию и боковой интервал относительно безопасных значений, формируется группа ненадежных водителей, определяющих уровень аварийности дорожного движения. Преобладание в транспортном потоке надежных или ненадежных водителей определяется менталитетом населения. По этой причине уровень активной безопасности дорожного движения в различных странах ЕС различается в несколько раз. Аналогичная ситуация имеет место при анализе активной безопасности в регионах России. Единственной объективной информацией о переходе границ безопасного управления является ДТП, произошедшее по вине водителя.
На основании изложенного можно сделать вывод о том, что повысить активную безопасность дорожного движения возможно только двумя способами: изменением менталитета населения; обеспечением водителей и органов дорожного надзора информацией об уровне безопасности управления автомобилем, получаемой в реальном масштабе времени.
Поскольку реализовать первый способ не представляется возможным, необходима разработка измеряемых показателей безопасности управления автомобилем, с помощью которых водитель будет в процессе управления получать информацию о безопасности выбираемых им режимов движения, а органы дорожного надзора смогут контролировать поведение водителя в дорожном движении и пресекать случаи перехода границ безопасного управления.
Около 40% ДТП по вине водителей происходит из-за превышения безопасной скорости. Основной причиной превышения безопасной скорости являются попытки водителей при движении в транспортном потоке повысить скорость сообщения путем реализации модели поведения гонщика.
На рис. 3 был приведен график изменения показателя безопасности управления автомобилем - средней наработки на ДТП SДТП в зависимости от отклонения скорости автомобиля от наиболее вероятной скорости транспортного потока. Из приведенного на рис. 3 графика видно, что отклонение скорости автомобиля от наиболее вероятной скорости транспортного потока, в обе стороны, снижает безопасность управления автомобилем. Это означает, что, во-первых, для безопасного управления автомобилем при снижении уровня удобства движения водитель должен делать то же самое, что и для повышения эффективности управления - ограничивать максимальную скорость тем больше, чем ниже уровень удобства движения. А во-вторых, он не может уменьшать скорость автомобиля относительно скорости транспортного потока больше, чем на определенную величину. Иными словами нельзя управлять безопасно, не управляя эффективно. На основании изложенного можно сделать заключение о том, что максимальная скорость является показателем безопасности управления автомобилем.
При реализации модели поведения гонщика водитель стремиться обогнать как можно больше автомобилей. Для этого, в ожидании возможности обгона, он уменьшает дистанцию относительно безопасного значения, интенсивно разгоняется, из-за большой разницы скоростей интенсивно тормозит, догоняя следующий автомобиль. При этом его движение происходит неравномерно, с большими ускорениями. Неравномерность движения отрицательно влияет и на эффективность и на безопасность управления автомобилем. Для ее оценки в теории транспортных потоков используется показатель, названный шумом ускорения - среднее квадратичное отклонение продольного ускорения от среднего значения ![]() [7].
[7].
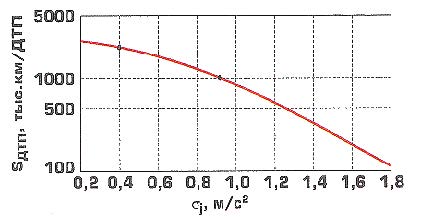
Рис. 4 - Зависимость средней наработки на ДТП SДТП от величины шума ускорения ![]()
На рис. 4 приведен график изменения показателя безопасности управления автомобилем SДТП в зависимости от шума ускорения ![]() [4].
[4].
В связи с изложенным, вторым показателем безопасности управления автомобилем является неравномерность движения - шум продольного ускорения. Обобщая можно сказать, что для повышения активной безопасности движения необходимо делать то же, что и для повышения эффективности управления автомобилем: в свободном транспортном потоке не превышать разрешенную скорость, при снижении уровня удобства движения ограничивать максимальную скорость относительно разрешенной, повышать равномерность движения автомобиля.
В работе [2] на основании анализа трудовой деятельности человека в различных сферах показано, что существует конфликт между мотивами к повышению эффективности достижения цели и безопасности. Проведенный анализ выявил интересную особенность деятельности водителя, заключающуюся в отсутствии такого конфликта, если водителей умеет правильно выбирать модель поведения в дорожном движении.
Это означает, что необходимо учить не безопасному управлению, а управлению с заданным качеством: заданными уровнями эффективности и безопасности. Аналогичную задачу необходимо ставить и при повышении квалификации водителей.
1.4. Экологичное вождение автомобиля
Автомобильный транспорт является одним из серьезных источников загрязнения атмосферы углекислым газом, создающим парниковый эффект, ведущий к глобальному потеплению. В связи с этим на международном уровне в 2010 г. было принято решение о разработки программы, которая позволит снизить эксплуатационный расход топлива в два раза. Одним из путей уменьшения эксплуатационного расхода топлива является применение метода экономичного управления автомобилем. В странах Европейского союза реализуются правительственные программы обучения экономичному вождению водителей, в программы подготовки водителей включено изучение метода экономичного управления автомобилем.
Проведенный анализ позволяет определить следующие показатели качества управления автомобилем.
Показатели эффективности управления автомобилем:
- средняя скорость сообщения Vс в км/ч;
- путевой расход топлива qs в л/100 км.
Показатели безопасности управления:
- максимальная скорость Vmax в км/ч;
- шум ускорения в м/с2.
Показатель экологичности управления автомобилем:
- путевой расход топлива qs в л/100 км.
2. Проведение испытаний легкового автомобиля
для определения нормативных зависимостей для вычисления
критериев качества управления легковым автомобилем
Чтобы задать уровни эффективности и безопасности и экологичности управления автомобилем, необходимо определить нормативные значения показателей качества управления: скорости сообщения Vс, расхода топлива qs, нормативных значений максимальной скорости V.н и шума ускорения.
При подготовке средств измерений к испытаниям, с учетом того, что средства контроля качества управления автомобилем должны быть пригодны для установки на учебные автомобили, была поставлена задача использования штатных датчиков для получения исходной информации, используемой при вычислении показателей качества управления.
Проведенные исследования показали невозможность вычисления величины шума ускорения с использованием штатного датчика скорости. В связи с этим было принято решение отказаться от вычисления шума ускорения. При принятии этого решения учитывалось то, что путевой расход топлива является комплексным показателем эффективности управления автомобилем, который изменяется пропорционально изменению шума ускорения.
Испытания проводились на автомобиле Лада Калина. Для измерения перечисленных выше показателей качества управления автомобилем был применен
Маршрутный компьютер производства Курского завода "СчетМаш". Общий вид МК14 показан на рис. 5.

Рис. 5 - Общий вид маршрутного компьютера МК-14
Перечень измеряемых параметров приведен в таблице 1.
Таблица 1 - Технические характеристики перепрограммированного МК14
Наименование параметра
Ед. изм.
Диапазон измерения
Дискретность измерения
Текущее время суток
ч, мин
00,00...23,59
1
Время поездки
ч, мин, с
00,00...23,59
1
Пробег за поездку
км
0,0...999,9
0,1
Расход топлива за поездку
л
0,0...999,9
0,1
Скорость сообщения в поездке
км/ч
0,0...150,0
0,1
Максимальная скорость в поездке
км/ч
0,0...150,0
0,1
Текущая (мгновенная) скорость
км/ч
0,0...150,0
0,1
Средний расход топлива в поездке
л/100 км
0,0...99,9
0,1
Текущий (мгновенный) расход топлива
л/100 км
0,0...99,9
0,1
Сигнализация о превышение заданной скорости
км/ч
0...150
5
Результаты измерений по окончании каждой поездки заносились в протокол. Форма протокола приведена в таблице 2.
Таблица 2 - Протокол N _1_ от 12.05.2014_г.
Водитель _Иванов_ Контролер_Петров_ ТС_Лада Калина ________
N п/п
Дата
![]()
км
![]()
ч:мин
Vс
км/ч
Vmax
км/ч
qs
л/100 км
qs.н
л/100 км
1.
12.05.
34
1:40
20,4
40
12
10,0
2.
14.05
34
1:43
19,8
40
12,2
10,0
3.
При проведении испытаний водитель использовал описанную выше оптимальную модель поведения в дорожном движении в сочетании с экономичным алгоритмом управления автомобилем.
Экономичный алгоритм управления автомобилем Лада Калина
Начинать движение сразу после пуска двигателя.
Разгон:
- производится при максимальном перемещении педали скорости;
- переключение на высшую передачу производится при следующих значениях частоты вращения коленчатого вала:
- при использовании 1 - 2 - 3 - 4 - 5 передач - 2000 мин-1
- при использовании 1 - 3 - 5 передач - 2500 мин-1
Установившееся движение осуществлять на самой высокой передаче обеспечивающей устойчивую работу двигателя. Минимально-устойчивые скорости движения на передачах:
5-я - 45 км/ч;
4-я - 30 км/ч
3-я - 20 км/ч;
2-я - 10 км/ч
Снижение скорости в результате повышения сопротивления движения:
- полностью переместить педаль скорости;
- переходить на низшие передачи при снижении частоты вращения коленчатого вала до 1700 мин-1.
Движение на спуске:
- при изменении скорости в пределах ![]() 5 км/ч использовать движение накатом;
5 км/ч использовать движение накатом;
- при увеличении скорости более чем на 5 км/ч - применять торможение двигателем;
- при невозможности выбора передачу, обеспечивающую движение на спуске с постоянной скоростью, помочь торможению двигателем, нажав на педаль тормоза.
Замедление:
- плановое замедление выполнять переходя к движению накатом;
- торможение педалью тормоза выполнять при приближении к точке завершения маневра с замедлением не более 2 м/с2.
Выключать двигатель сразу после завершения поездки.
Испытания проводились на дорогах Москвы, Московской области и на автомагистрали I-й категории Москва - Дон. Максимальная скорость в городе не превышала 70 км/ч, на шоссе - 100 км/ч, на автомагистрали - 120 км/ч. Полученные результаты испытаний были положены в основу разработки требований к нормативным значениям максимальной скорости и расхода топлива.
3. Теоретическое обоснование и выбор контролируемых
параметров эффективности, безопасности и экологичности
управления легковым автомобилем
Чтобы создать обратную связь о качестве управления автомобилем, недостаточно измерить показатели качества управления, необходимо сравнить их с нормативными значениями. Только в этом случае водитель получит информацию о том, насколько эффективно, безопасно и экологично он управляет автомобилем.
При проведении испытаний использовалась модель оптимального управления автомобилем, поэтому полученные результаты могут быть приняты в качестве нормативных значений показателей качества управления автомобилем.
Поскольку средняя скорость сообщения, максимальная скорость и путевой расход топлива зависят от условий движения, возникает необходимость установления зависимостей нормативных значений измеряемых показателей качества управления автомобилем от условий движения. Главным фактором, характеризующим условия движения, является плотность транспортного потока. Проблема заключается в том, что оценить уровень удобства движения в транспортном потоке невозможно путем измерения параметров движения автомобиля.
Наиболее информативным измеряемым показателем уровня удобства движения в транспортном потоке является средняя скорость сообщения. Каждый водитель стремиться достичь пункта назначения с оптимальной, по его пониманию, средней скоростью. Величина средней скорости сообщения зависит от максимальной скорости, развиваемой на участках свободного движения. Как было показано на рис. 1, чтобы ехать с оптимальной средней скоростью сообщения, максимальная скорость не должна превышать определенной величины. Иными словами, если максимальная скорость превышает среднюю скорость сообщения на величину больше оптимальной, то это означает снижение эффективности и безопасности управления автомобилем. На основании изложенного можно сделать вывод о том, что если при эксплуатационных испытаниях водитель реализует оптимальную модель управления автомобилем, то мы можем построить зависимость максимальной скорости от величины средней скорости сообщения, то, используя ее, можно при известной средней скорости сообщения мы можем определить нормативную величину максимальной скорости. Зависимость максимально скорости от средней скорости сообщения, определенная для одного легкового автомобиля, пригодна для определения нормативного значения максимальной скорости всех легковых автомобилей. Это связано с тем, что зависимость максимальной скорости от средней скорости сообщения определяется не скоростными свойствами легкового автомобиля, а уровнем удобства движения в транспортном потоке.
Путевой расход топлива так же зависит от средней скорости сообщения. Однако его величина зависит от топливно-скоростных свойств конкретной модели автомобиля. Поэтому для определения нормативной зависимости путевого расхода топлива от средней скорости сообщения требуется проведение лабораторно-дорожных испытаний для каждой модели автомобиля. Поскольку это могут сделать только заводы изготовители, применить такую зависимость для оценки качества управления автомобилем при обучении вождению невозможно. Поэтому для нормирования путевого расхода топлива были использованы Нормы расхода топлива и смазочных материалов на автомобильном транспорте [8], утверждаемые Минтрансом России. Нормы расхода топлива устанавливаются практически для всех моделей транспортных средств, эксплуатируемых на территории России. В основу нормирования положена базовая норма расхода топлива, которая устанавливается для каждой модели автомобиля. А для учета условий эксплуатации применяются повышающие коэффициенты. Нормы расхода топлива повышаются при следующих условиях:
- при снижении температуры ниже определенной величины. Величина коэффициента увеличивается при снижении температура окружающего воздуха;
- при работе автомобиля в условиях повышенной высоты над уровнем моря. Величина коэффициента увеличивается при повышении высоты над уровнем моря;
- при работе автомобиля в городах. Величина коэффициента увеличивается при увеличении численности населения в городе;
- при повышении срока эксплуатации автомобиля.
На основании обработки протоколов испытаний была построена зависимость изменения максимальной скорости автомобиля от средней скорости сообщения.
Нормативное значение путевого расхода топлива определялось в соответствии с методическими указаниями Минтранса России.
4. Разработка алгоритмов вычисления измеряемых параметров
и их нормативных значений
Сводные протоколы результатов эксплуатационных испытаний автомобиля Лада Калина приведен в Приложении 1, табл. П.1.1 и П.1.2. В табл. П.1 приведены показатели качества управления в поездках, в табл. П.2 - в ездовых циклах, каждый из которых равен 5 км. Результаты испытаний, полученные в процессе поездки, были использованы для сравнения с нормативами расхода топлива, установленными Минтрансом России. Результаты испытаний в ездовых циклах были использованы для определения алгоритмов вычисления нормативных значений максимальной скорости в зависимости от величины средней скорости сообщения. Для определения указанной зависимости на график с осями: ось абсцисс - средняя скорость сообщения Vс, ось ординат - максимальная скорость Vmax, были нанесены данные из табл. П.2. Были выделены три диапазона изменения средней скорости сообщения Vс, в пределах которых зависимость Vmax от Vс можно было аппроксимировать линейными функциями. В результате была получена кусочно-линейная функция, описывающая изменение нормативной максимальной скорости Vmax.н в зависимости от средней скорости сообщения Vс. Полученный график приведен на рис. 6.
Максимальная нормативная скорость вычисляется по уравнениям:
Vmax.н = 0.964Vс + 30 км/ч, если 0 < Vс. ![]() 27.5 км/ч (2)
27.5 км/ч (2)
Vmax.н = 0,493Vс + 42.93 км/ч, если 27.5 < Vс. ![]() 75 км/ч (3)
75 км/ч (3)
Vmax.н = Vс + 10 км/ч, если 75 < Vс. км/ч (4)
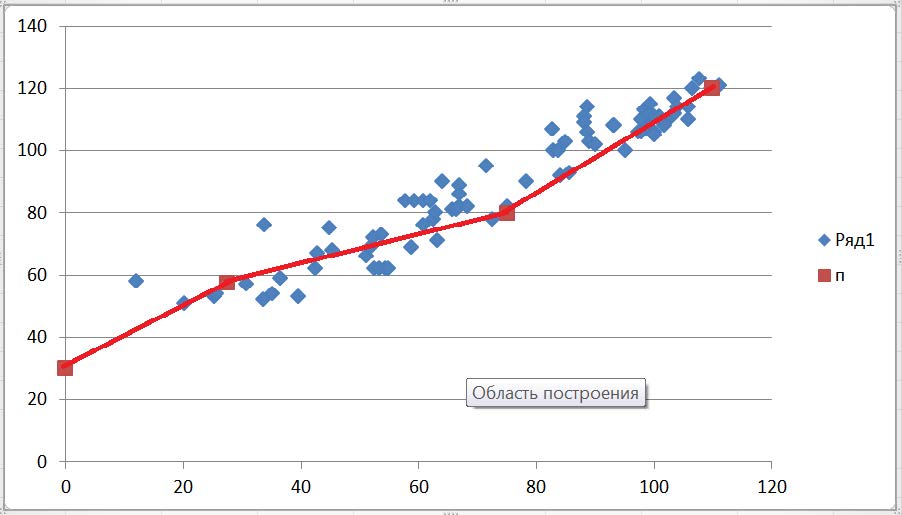
Рис. 6 - Зависимость максимальной нормативной скорости Vmax.н от средней скорости сообщения Vс
Вычисление нормативного расхода топлива производится по методике, приведенной в приложении 2.
5. Разработка компьютерных программ реализации алгоритмов
вычисления критериев качества управления
Для реализации алгоритмов вычисления разработано программное обеспечение, которое вычисляет следующие параметры:
- пройденный путь;
- среднюю скорость;
- максимальную скорость;
- расход топлива.
Кроме того, вычисляются нормативные значения для:
- максимальной скорости;
- расхода топлива.
По результатам каждой поездки формируется протокол. На основании анализа всех поездок строятся графики результатов обучения, описывающие изменение максимальной скорости и расхода топлива от количества поездок.
6. Выбор IT-устройства
Требования, предъявляемые к IT-устройству:
- устройство должно быть переносным и портативным;
- время непрерывной работы без подзарядки не менее 8 часов;
- возможность подзарядки от бортовой сети автомобиля;
- необходимо наличие клавиатуры для ввода данных;
- размер экрана не менее 10 дюймов по диагонали;
- яркость экрана должна быть достаточной для работы в солнечную погоду;
- операционная система Windows 7 или более новая;
- минимально возможная стоимость.
Были проанализированы различные устройства в следующих форм-факторах: планшеты, нетбуки, ноутбуки.
Большая часть планшетов с диагональю экрана более 10 дюймов работает под управлением операционной системы Android и iOS. У таких планшетов небольшие аккумуляторы, и продолжительность непрерывной работы менее 8 часов. Планшеты с необходимой продолжительностью работы и ОС Windows 7 более дорогие - стоят от 20 тыс. руб.
Ноутбуки низкой ценовой категории не соответствуют требованиям продолжительности автономной работы.
Нетбуки подходят по всем критериям при стоимости порядка 12 тыс. руб. Например, ASUS Eee PC 1025c.
7. Разработка программного обеспечения для IT-устройства
Для реализации алгоритмов вычисления разработано программное обеспечение для переносного компьютера с операционной системой Windows 7 или более новой. Программное обеспечение позволяет записывать данные поступающие с передатчика, рассчитывать критерии качества управления и сохранять результаты для последующего анализа. Возможна установка программы на настольный компьютер для просмотра и вывода на печать отчетов о качестве управления.
Программное обеспечение написано на языке C# под .NET Framework v4.0. Данные результатов измерения хранятся в локальной базе данных SQLite. Отчеты создаются в формате PDF. Программное обеспечение прилагается на компакт-диске.
8. Подготовка руководства по применению
технического средства контроля эффективности,
безопасности и экологичности вождения при профессиональном
обучении водителей транспортных средств, включающее общие
сведения о назначении технического средства контроля,
алгоритм запуска и выхода из программы, принципы
оценки контроля эффективности, безопасности
и экологичности вождения
Руководство по применению технического средства контроля эффективности, безопасности и экологичности вождения транспортного средства приведено в приложении 3.
9. Разработка технического задания на техническое средство
Техническое задание на техническое средство контроля эффективности, безопасности и экологичности управления транспортным средством категории "В" приведено в приложении 4.
10. Разработка методики и технического средства
контроля эффективности, безопасности и экологичности
вождения в условиях дорожного движения и рекомендаций
по их применению для профессионального обучения водителей
транспортных средств различных категорий и подкатегорий
Методика применения технического средства контроля качества управления автомобилем проведена в приложении 5.
Литература
1. Котик М.А. Курс инженерной психологии. - 2-е изд. испр. и доп. - Талион, Валгус, 1978. - 364 с.
2. Котик М.А. Психология и безопасность. Изд. 2-е, испр. и доп. - Таллин: Валгус, 1987 - 440 с.
3. Клебельсберг Д. Транспортная психология: Пер. с нем/под ред. В.Б. Мазуркевича - М.: Транспорт - 367 с.
4. Майборода О.В. Основы управления автомобилем и безопасность движения: учебник водителя автотранспортных средств категорий "C", "D", "E"/О.В. Майборода - 4-е изд. стер. - М.: Академия, 2008 - 256 с.
5. Майборода О.В. Искусство управления автомобилем. Как предотвращать нештатные ситуации: учебное пособие водителя автотранспортных средств категории "В"/О.В. Майборода - М.: МААШ, 2009 - 106 с.
6. Майборода О.В. Кто он безопасный водитель? Для повышения безопасности необходимо изменить поведение водителей. - Автомоб. транспорт, 2003, N 11, с. 25 - 26.
7. Дрю Д. Теория транспортных потоков и управление ими/Пер. с англ. Коваленко Е.Г. и Шермана Г.Д. Под ред. чл.-корр. АН СССР Бусленко Е.Г. - М.: Транспорт, 1972 - 357 с.
8. Методические рекомендации "Нормы расхода топлива и смазочных материалов на автомобильном транспорте". - М.: Минтранс России, 2008.
Приложение 1
Таблица П.1.1 - Сводный протокол показателей качества управления автомобилем Лада Калина в поездке
N п/п
![]()
км
kt
Vс
км/ч
Vmax
км/ч
qs
л/100 км
qs.н
л/100 км
1
20
0,72
14,6
50
13,2
10
2.
66
0,73
26,2
82
8,8
10
3.
18
0,95
56,9
83
6,2
8
4.
16,4
0,84
26,4
61
9,5
10
5.
150
1
69
107
6,8
8
6.
250
0,91
75,8
107
7
8
7.
316
0,92
77,2
107
7
8
8.
155
0,94
91,2
109
6,9
8
9.
146
0,92
78,7
100
6,9
8
10.
182
0,86
66.1
105
6,9
8
11.
18,4
0,6
22,7
51
10,2
10
12.
46
0,94
40,2
81
8,5
10
13.
50
0,96
47
75
6,3
8
14.
51
0,94
42,2
76
7,8
8
15.
52,5
0,97
42
73
5,6
8
16.
118
0,95
39.6
81
7,1
8
17.
131
0,96
64
98
6,3
8
18.
204
0,93
74,6
110
6,8
8
19.
384
0,96
79,6
109
7
8
20.
860
0,88
69,1
112
7,1
8
21.
34,8
0,77
41,7
87
8
8
22.
19,8
0,99
65
80
7,1
8
N п/п
![]()
км
kt
Vс
км/ч
Vmax
км/ч
qs
л/100 км
qs.н
л/100 км
23.
18,9
0,93
54,1
79
7
8
24.
27
0,99
61,9
72
6
8
25.
41,1
0,95
50,4
71
6,3
8
26.
21,5
0,86
31,3
55
7,9
8
27.
15,4
0,91
50,2
65
7,3
10
28.
21,8
0,97
27,3
58
9,9
10
29.
33,2
0,97
58,9
72
6,9
8
30.
18,9
0,98
56,5
71
7,6
8
31.
15,1
0,99
59.1
68
6,2
8
32.
21,5
0,86
31,3
55
7,9
8
33.
22
0,93
35,3
69
8
8
34.
36,5
0,93
60,9
91
7,7
8
35
19,4
0,98
58,3
80
6,5
8
36.
19,2
0,98
66
80
6,4
8
37.
18,1
1
68,5
82
7,3
8
38.
15,7
0,97
66,5
88
7,6
8
39.
21,5
0,85
42,1
69
7,7
8
40.
21,7
0,69
25,9
71
10
10
41.
33,1
1
72,2
87
6,9
8
42.
18,9
0,91
52
83
7,5
8
43.
19.4
1
59,7
72
5,4
8
44.
32,6
0,95
62,8
77
6
8
45.
21,3
0,8
31,2
62
7,2
10
46.
14,7
0,78
24,6
51
8,4
10
47.
32,7
0,97
54,4
64
5,9
8
48.
18,7
1
52,2
62
6.4
8
49.
19,4
0,96
56,1
72
6
8
50.
27
0,95
52,2
68
5,7
8
51.
28,5
0,82
28
60
8
8
N п/п
![]()
км
kt
Vс
км/ч
Vmax
км/ч
qs
л/100 км
qs.н
л/100 км
52.
23
0,54
16,8
69
12
10
53.
34
1
54
88
7
8
54.
19,8
0,99
50,6
79
6,6
8
55.
20,4
0,97
61,4
75
5,3
8
56.
33,4
0,95
61,6
75
5,7
8
57.
21,4
1
36,6
64
6,7
8
Таблица П.1.2. - Сводный протокол показателей качества управления автомобилем Лада Калина в ездовом цикле
N п/п
![]()
км
kt
Vс
км/ч
Vmax
км/ч
qs
л/100 км
qs.н
л/100 км
1.
5
0,57
12
58
17,3
2.
5
1
60,8
84
7,1
3.
5
1
53,6
73
6,4
4.
5
0,97
66,9
82
5,3
5.
5
1
72,6
78
4,7
6.
5
1
51,1
66
5,4
7.
5
0,78
25,2
53
8
8.
5
1
54,9
62
5,5
9.
5
1
53,3
62
5,5
10.
5
0,92
44,8
75
7,8
11.
5
1
66,4
81
6,8
12.
5
1
59,2
84
5,4
13.
5
1
60,8
76
5,4
14.
5
1
75
82
4,7
N п/п
![]()
км
kt
Vс
км/ч
Vmax
км/ч
qs
л/100 км
qs.н
л/100 км
15.
5
0,91
35,1
54
6,2
16.
5
0,98
71,5
95
7,9
17.
5
1
51,7
69
5,5
18.
5
1
65,7
81
7,3
19.
5
0,92
61,9
84
7
20.
5
0,88
42,4
62
6,9
21.
5
0,99
39,5
53
6,8
22.
5
0,91
52,5
62
7,4
23.
5
1
54,4
62
6
24.
5
0,71
20,1
51
13,3
25.
5
0,92
66,9
89
6,8
26.
5
0.97
66,9
86
6,3
27.
5
1
68,2
82
6,2
28.
5
1
63,2
71
5,8
29.
5
1
89,1
103
5,7
30.
5
1
97,8
106
6,9
31.
5
1
98,4
113
5,2
32.
5
1
95.2
100
8,1
33.
5
1
101
111
6,6
34.
5
1
104
114
6,9
35.
5
1
99,4
111
6,2
36.
5
1
88,7
106
8,1
37.
5
1
93,1
108
7,4
38.
5
1
105,9
110
7,5
39
5
1
99,4
115
5,9
40.
5
1
97,3
106
7
41.
5
1
82,9
100
5,8
N п/п
![]()
км
kt
Vс
км/ч
Vmax
км/ч
qs
л/100 км
qs.н
л/100 км
42
5
1
82,7
107
6,2
43.
5
1
109,8
120
6,9
44.
5
1
111,1
121
7,3
45
5
1
107,8
123
7,8
46
5
1
103,4
117
7
47.
5
1
106,5
120
8,2
48.
5
1
105,9
114
7,5
49.
5
1
103.4
112
6,4
50.
5
1
100
111
6
51.
5
1
98,9
107
52.
5
1
101,7
108
7,7
53.
5
1
102,9
111
7,2
54.
5
1
97,8
110
5,9
55.
5
1
102,9
111
8,6
56.
5
1
99,4
112
7
57.
5
1
100
106
7,2
58.
5
1
88,7
114
6,8
59.
5
1
88,2
111
7,2
60.
5
1
88,2
109
5,7
61.
5
1
93,3
108
6,7
62.
5
1
33,8
76
6,3
63.
5
1
83,7
100
5,6
63.
5
1
33,6
52
7,7
64.
5
1
30.7
57
7,4
65
5
0,86
62,9
80
4,8
66.
5
1
100
105
67
5
1
90
102
6,7
N п/п
![]()
км
kt
Vс
км/ч
Vmax
км/ч
qs
л/100 км
qs.н
л/100 км
68
5
1
84,9
103
6,6
68.
5
1
85,7
93
6,5
69.
5
0,88
25,6
54
8,9
70.
5
0,91
36,4
59
7,1
71
5
1
45,3
68
5,6
72.
5
1
42,7
67
6,5
73.
5
1
52,3
72
6
74.
5
1
64,1
90
5,2
75.
5
1
84,1
92
5,3
76.
5
1
57,8
84
6,2
77.
5
1
58,8
69
6,8
78.
5
1
78,3
90
4,9
79.
5
1
62,5
78
5,4
Приложение 2
Извлечение из распоряжения Минтранса России
от 14 марта 2008 г. N АМ-23-р
МЕТОДИКА ОПРЕДЕЛЕНИЯ НОРМАТИВНОГО РАСХОДА ТОПЛИВА
1. Нормативный расход топлива определяется с учетом условий движения на испытательном маршруте.
2. Основой для расчета нормативного расхода топлива является базовый расход топлива. Учет условий движения на испытательном маршруте осуществляется путем применения повышающих коэффициентов. Вычисления производятся по формуле:
qн = 0,01qб ![]() ki, л/100 км
ki, л/100 км
где:
qн - нормативный расход топлива, л/100 км;
qб - базовый расход топлива л/100 км;
![]() ki - сумма повышающих коэффициентов ki, %.
ki - сумма повышающих коэффициентов ki, %.
3. Значения базового расхода топлива для отечественных легковых автомобилей, автомобилей стран СНГ определяется в зависимости от модели автомобиля по табл. 7.1, для зарубежных автомобилей - по табл. 7.2 методических рекомендаций "Нормы расхода топлива и смазочных материалов на автомобильном транспорте" (приложение к распоряжению Минтранса РФ от 14 марта 2008 года АМ N 23-Р). Базовый расход топлива для автомобилей ВАЗ приведен в табл. П.2.1. При отсутствии в табл. марки используемого для обучения автомобиля, за базовый расход топлива принимается средняя величина, вычисленная по автомобилям с аналогичными рабочими объемами и близкими значениями мощности двигателя.
4. Для учета условий движения на испытательном маршруте применяются следующие значения повышающих коэффициентов.
4.1. В зависимости от высоты над уровнем моря:
- от 300 до 800 м - 5%;
- от 801 до 2000 м - 10%;
- от 2001 до 3000 м - 15%;
- свыше 3000 м - 20%.
4.2. На загородных дорогах общего пользования, где в средне на 1 км пути имеется более 5 поворотов радиусом 40 и менее метров - до 10%, на дорогах общего пользования IV и V категорий - до 30%.
4.3. В городах и населенных пунктах численностью населения:
- до 100 тыс. человек при наличии регулируемых перекрестков, светофоров или других знаков дорожного движения - 5%;
- от 100 до 250 тыс. человек - 10%;
- от 250 тыс. до 1 млн. человек - 15%;
- от 1 до 3 млн. человек - 20%;
- свыше 3 млн. человек - 25%.
4.4. Для автомобилей со следующими сроками эксплуатации и величинами пробега, соответственно:
- более 5 лет и более 100 тыс. км - 5%;
- более 8 лет и более 150 тыс. км - 10%.
4.5. В зимнее время года в зависимости от климатических районов страны повышение нормы расхода топлива и сроки введения повышающих коэффициентов производится в соответствии с приложением N 2 "Значения зимних надбавок к нормам расхода топлива по регионам России в зависимости от климатических условий" Методических рекомендаций "Нормы расхода топлива и смазочных материалов на автомобильном транспорте" (приложение к распоряжению Минтранса РФ от 14 марта 2008 года АМ N 23-Р).
4.6. На дорогах общего пользования I, II и III категорий вне населенных пунктов расход топлива уменьшается до 15%.
5. Если на испытательном маршруте встречаются участки, на одном из которых необходимо применять повышающий коэффициент (движение по городу), а на другом нет (движение по шоссе), то величину повышающего коэффициента необходимо уменьшить по формуле:
kс = SГ/S, %
где:
kс - скорректированное значение повышающего коэффициента, %;
k - значение повышающего коэффициента по п. 4.2.
SГ - протяженность маршрута по городу, км;
S - длина испытательного маршрута, км.
Таблица П.2.1. - Значения базового расхода топлива. Легковые автомобили ВАЗ <1>
--------------------------------
<1> Курсивом (по всему документу) обозначены нормы, рассчитанные до 1997 г.
Модель, марка, модификация автомобиля <1>
Базовая норма, л/100 км
Топлива <2>
1
2
3
ВАЗ-11183 "Калина" (ВАЗ-21114-4L-1,596-81-5М)
8,0
Б
ВАЗ-2104 &
8,5
Б
ВАЗ-21041 (ВАЗ-21067.10-4L-1,568-74,5-5М)
9,1
Б
ВАЗ-21043 (ВАЗ-2103-4L-1,45-71-5М)
8,3
Б
ВАЗ-21043 (ВАЗ-2103-4L-1,451-71,5-4М)
9,0
Б
ВАЗ-2105, -21051, -21053 ВАЗ-2105, -21051, -21053 &
8,5
Б
ВАЗ-2106 (ВАЗ-2106-4L-1,57-75,5-5М)
8,5
Б
ВАЗ-21063 (ВАЗ-2130-4L-1,77-82-5М)
9,0
Б
ВАЗ-2107 (ВАЗ-2103-4L-1,45-72,5-4М)
9,0
Б
ВАЗ-2107 (ВАЗ-2103-4L-1,45-72,5-4М)
9,0
Б
ВАЗ-21072 (ВАЗ-2105-4L-1,3-63,5-4М)
8,6
Б
ВАЗ-21072 (ВАЗ-2105-4L-1,3-63,5-4М)
8,9
Б
ВАЗ-21074 (ВАЗ-2106-4L-1,57-75,5-5М)
8,5
Б
ВАЗ-21074 (ВАЗ-21067-4L-1,568-74,5-5М)
8,9
Б
ВАЗ-2108, -2108 "Спутник", -21081, -21083, -2109 &
8,0
Б
ВАЗ-21093 (ВАЗ-2111-4L-1,499-79-5М)
7,7
Б
ВАЗ-21093; -21099 1,5i (ВАЗ-21083-20-4L-1,5-71-5М)
7,5
Б
1
2
3
ВАЗ-21099 (ВАЗ-2111-4L-1,499-79-5М)
7,8
Б
ВАЗ-2110 1,5i (ВАЗ-21083-20-4L-1,5-71-5М)
7,4
Б
ВАЗ-2110-010 (ВАЗ-2110-4L-1,499-73-5М)
7,8
Б
ВАЗ-21102 (ВАЗ-2111-4L-1,499-79-5М)
7,5
Б
ВАЗ-21112-00 1.6 (ВАЗ-21114-4L-1,596-80-5М)
8,3
Б
ВАЗ-21113 (ВАЗ-2112-4L-1,499-92-5М)
7,8
Б
ВАЗ-2112 (ВАЗ-2112-4L-1,499-92-5М)
7,7
Б
ВАЗ-21140 (ВАЗ-2111-4L-1,499-79-5М)
7,9
Б
ВАЗ-21150 (ВАЗ-2111-4L-1,499-79-3,94-5М)
7,4
Б
--------------------------------
<1> В скобках обозначаются (по всему документу) основные параметры двигателя и коробки передач (по данным производителей техники или по каталогам), например: ВАЗ-21043 - марка двигателя; 4L - число и расположение цилиндров (L - рядное, V - образное, O - оппозитное); 1,45 - рабочий объем двигателя, л; 71 - мощность двигателя, л.с.; 5М - количество передач (М - механическая; А - автоматическая коробка передач, CVT - бесступенчатая автоматическая).
<2> Условные обозначения: Б - бензин; Д - дизтопливо; СНГ - сжиженный нефтяной газ; СПГ - сжатый природный газ.
Приложение 3
РУКОВОДСТВО
ПО ПРИМЕНЕНИЮ ТЕХНИЧЕСКОГО СРЕДСТВА КОНТРОЛЯ ЭФФЕКТИВНОСТИ,
БЕЗОПАСНОСТИ И ЭКОЛОГИЧНОСТИ ВОЖДЕНИЯ
ТРАНСПОРТНОГО СРЕДСТВА (СКВ)
П.3.1. Назначение и область применения
Техническое средство контроля вождения транспортного средства (СКВ) предназначено для применения при обучении вождению транспортных средств категории "В", оборудованных инжекторным двигателем с искровым зажиганием с электронным управлением подачей топлива.
СКВ определяет уровень умения водителя управлять автомобилем в реальных условиях движения путем сравнения измеряемых показателей качества управления с нормативными значениями этих показателей. Нормативные значения вычисляются на основании предварительно определенных зависимостей этих показателей от условий движения в транспортном потоке.
СКВ предназначен для применения на транспортных средствах категории "В", которые оборудованы спидометром с электрическим приводом от датчика Холла и имеющих выход для получения сигнала о величине расхода топлива.
СКВ создана на базе Netbook путем разработки программы вычислений измеряемых и нормативных значений показателей качества управления транспортным средством. Связь с датчиками пути и расхода топлива осуществляться по системе Bluetooth.
Определяемые показатели качества управления автомобилем, единицы, диапазоны и дискретность отображения показателей на дисплее приведены в таблице П.3.1.
Перечисленные в таблице П3.1 показатели качества управления записываются в память Netbook в функции пути и времени.
Результаты измерений показателей качества управления заносятся в протокол, наличие которого позволяет анализировать процесс приобретения умения управлять транспортным средством в результате обучения. При заполнении протокола устанавливается пауза в изменении значений показателей качества управления на дисплее. Включение и выключение паузы производится клавишей "пробел". После прекращения паузы СКВ выведет на дисплей значения показателей качества управления с учетом вычислений, выполненных в период паузы.
П.3.2. Описание СКВ
Таблица П.3.1. - Перечень показателей качества управления автомобилем, выводимых на дисплей СКВ
N п/п
Измеряемые параметры
Обозначение
Единица измерения
Диапазон измерения
Дискретность
1.
Средняя скорость сообщения в поездке
Vс
км/ч
0...200
0,1
2.
Максимальная скорость в поездке
Vmax
км/ч
0...150
0,1
3.
Нормативное значение максимальной скорости в поездке <1>
Vmax.н
км/ч
0...150
0,1
4.
Путевой расход топлива в поездке
qs
л/100 км
0...50
0,1
5.
Нормативное значение путевого расхода топлива <2>
qs.н
л/100 км
0...50
0,1
6.
Пробег с начала поездки
![]()
км
0...1000
1
7.
Продолжительность поездки
![]()
ч:мин
0...24 ч
1 мин
--------------------------------
<1> Вычисляется на основании зависимости максимальной скорости Vmax от средней скорости сообщения Vс.
<2> Устанавливается Минтрансом России, его значение вводится Netbook при его настройке.
На рис. П.3.1 и П.3.2 показана комплектация СКВ. На рис. П.3.1 показан передатчик информации по системе Bluetooth от датчиков скорости и расхода топлива к компьютеру Netbook, а на рис. П.3.2 - общий вид Netbook с изображением на дисплее выводимой информации.

Рис. П.3.1 - Внешний вид передатчика информации по системе Bluetooth от датчиков скорости и расхода топлива к компьютеру Netbook
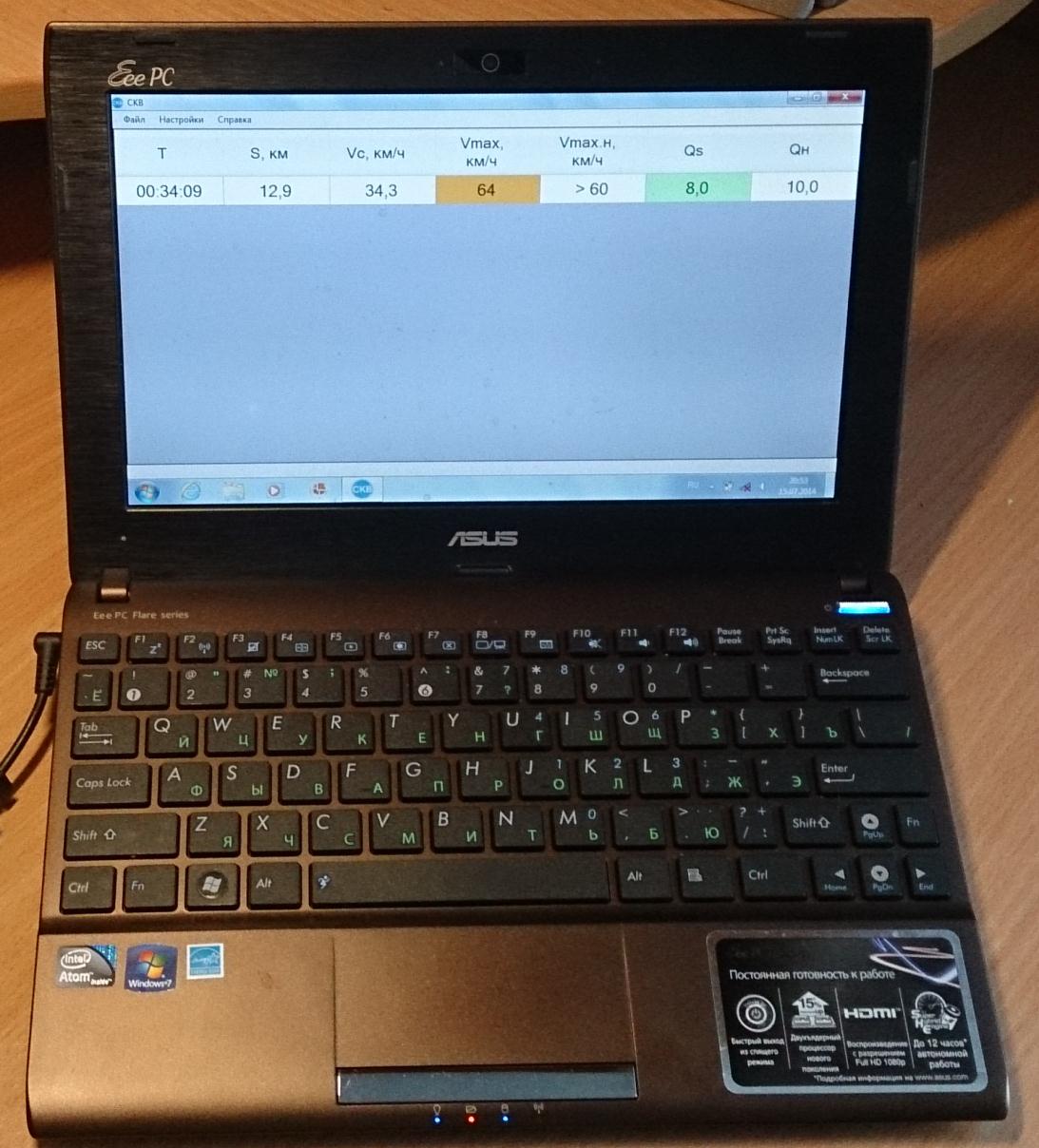
Рис. П.3.2 - Общий вид Netbook с изображением на дисплее выводимой информации
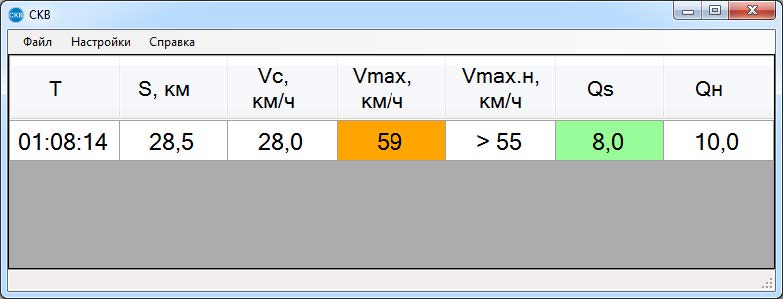
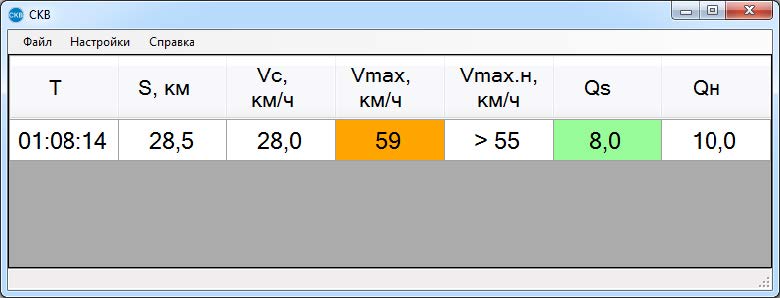
На рис. П.3.3 показан вид выводимой на дисплей информации о качестве управления транспортным средством в поездке.

Рис. П.3.3 - Вид показателей качества управления, выводимых на дисплей в процессе поездки
Из рис. П.3.3 видно, что максимальная скорость в поездке не соответствуют установленным нормативам.
П.3.3. Подключение СКВ к датчикам скорости
и расхода топлива
Жгут проводов подключается к проводам, передающим импульсы датчика Холла к спидометру, импульсы от датчика расхода топлива к компьютеру, соответственно.
П.3.3.1. Подключение передатчика к датчикам скорости
расхода топлива
Датчики скорости и расхода топлива подключаются к передатчику с помощью жгута проводов. Сначала необходимо подключить жгут к проводам, передающим импульсы от датчика скорости и датчика расхода топлива. После этого присоединить разъем жгута к разъему передатчика. Нумерация контактов разъема передатчика, к которому присоединяется разъем жгута, показан на рис. П.3.4.
Рис. П.3.4. Нумерация контактов разъема передатчика
Таблица П.3.2. - Назначение контактов в разъеме приведено в табл. П.3.2.
N
Назначение
Примечание
1
Импульсный вход 1
Датчик расхода топлива
2
Импульсный вход 2
Датчик скорости
3
+ АКБ
+ 8...28 В
4
Общий провод (-)
5
Аналоговый вход 1
Не используется
6
Аналоговый вход 2
Не используется
П.3.3.2. Подключение передатчика к компьютеру
Включите зажигание. На передатчике должен начать медленно мигать индикатор, сигнализирующий о том, что передатчик включен.
Если модуль Bluetooth встроен в компьютер, его необходимо включить. При отсутствии встроенного модуля - подсоединить внешний модуль. При подключении модуля Bluetooth к компьютеру в нижней части экрана должен появиться значок:

Данная операция выполняется один раз на каждом из компьютеров, который будет использоваться в качестве СКВ.

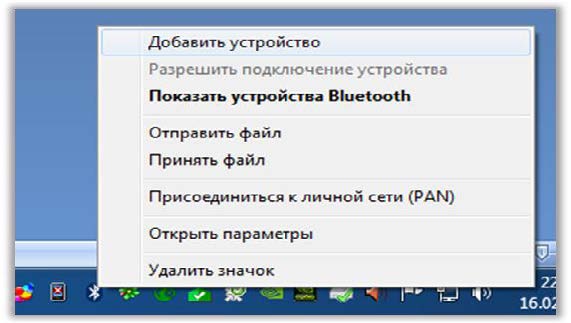
Нажмите правую кнопку мышки на значке Bluetooth и в появившемся меню выберите пункт "Добавить устройство":
Произойдет поиск устройств Bluetooth:
Через несколько секунд появится список обнаруженных устройств:

В списке будут все устройства, находящиеся в радиусе действия сети Bluetooth. Необходимо выбрать "IDP-12 Remote Sensor" (подвести курсор к значку "IDP-12 Remote Sensor" и щелкнуть левой кнопкой мышки один раз). Нажать кнопку "Далее":
Выполнится установка драйвера устройства, после чего, появится сообщение об успешном подключении передатчика:

П.3.3.3. Определение номера порта для подключения
передатчика к компьютеру
Чтобы передатчик мог передавать информацию компьютеру, необходимо определить номер порта подключения передатчика к компьютеру нажмите правую кнопку мышки на значке Bluetooth внизу экрана и в появившемся меню выберите пункт "Показать устройства Bluetooth" откроется окно с подключенными устройствами:
Нажмите правую кнопку мышки на значке "IDP-12 Remote Sensor" и в появившемся меню выберите пункт "Свойства":
В окне "Свойства" перейдите на закладку "Службы". В списке "Службы Bluetooth" смотрим и запоминаем номер порта - "COM6":
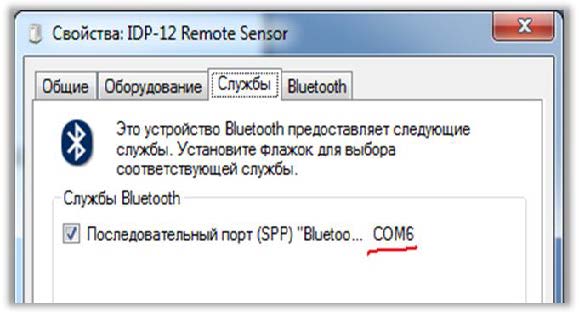
Данный номер порта необходимо выбирать при подключении к программе СКВ.
Данная операция выполняется один раз на каждом из компьютеров, который будет использоваться в качестве СКВ.

П.3.4. Работа с программой
П.3.4.1. Запуск программы
При включении компьютера на рабочем столе появляется иконка программы СКВ-1:

Для запуска программы необходимо сделать двойной щелчок левой кнопкой мыши на этой иконке. Примерный вид окна программы после запуска:
П.3.4.2. Установка соединения с передатчиком
После запуска программы, необходимо установить соединение с передатчиком. Для этого поставьте курсор в меню на "Настройки" и
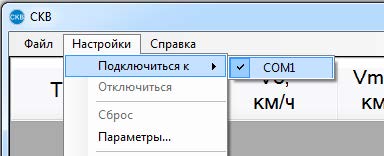
щелкните левой кнопкой мышки. В появившемся меню выберите "Подключиться к" и поставьте курсор на номер порта, к которому подключен передатчик. В данном примере это "COM 1":
Если нужного порта нет в списке - проверьте, включен ли модуль Bluetooth на компьютере.
Если передатчик не включен, то появится сообщение об ошибке:
В случае успешного подключения в низу экрана появится соответствующее сообщение:
Для выхода из программы необходимо поставить курсор на кнопку панели инструментов "x" и щелкнуть левой кнопкой мышки.
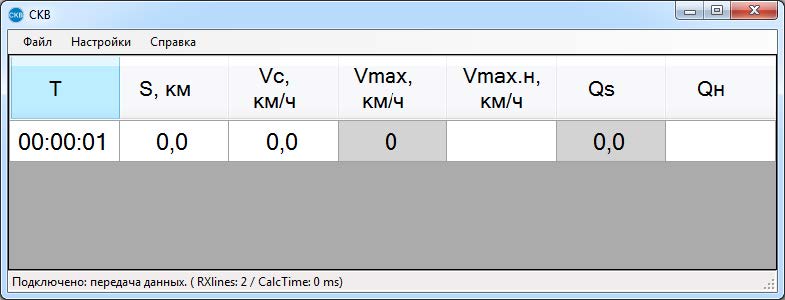
Для начала измерений необходимо удалить из памяти компьютера (сбросить) результаты предыдущих измерений. Для этого необходимо нажать комбинации клавиш Ctrl+S. При этом начинается передача данных, что подтверждается частым миганием индикатора состояния на передатчике, а в строке появятся нули:
П.3.5. Отображение параметров качества управления
Параметры качества управления всегда отображаются на дисплее. Если у параметра имеется норматив и значение параметра находится в пределах норматива, ячейка с вычисленным значением выделяется зеленым цветом. Если значение параметра за пределами норматива - выделяется оранжевым цветом и у значения норматива появляется знак ">" или "<":
Пауза
При необходимости зафиксировать показатели на экране, необходимо нажать клавишу "Пробел". При этом, содержимое экрана не будет изменяться.
После повторного нажатия клавиши отображение на экранах продолжит обновление с учетом вычислений, выполненных в период паузы.
Во время паузы останавливается только изменение отображения данных, вычисленных на момент введения паузы. Вычисление параметров качества управления продолжается и после завершения паузы они будут выведены на экран!

П.3.6. Настройка параметров СКВ
Для настройки компьютера необходимо выбрать в меню "Настройки"/"Параметры...":
Щелкнуть левой кнопкой мышки на закладке "Параметры":
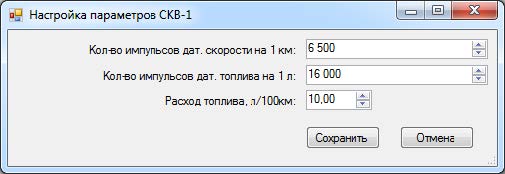
Значения настраиваемых параметров СКВ.
Количество импульсов датчика скорости равно 6500 на 1000 метров пути.
Количество импульсов датчика расхода топлива равно 16000 на 1 литр.
Базовый расход топлива равен 8 л/100 км (определяется в соответствии с приложением 2)
Изменения настроек происходит в момент выполнения сброса накопленной информации, т.е. на показатели текущей поездки изменение настроек не влияет.

Приложение 4
ТЕХНИЧЕСКОЕ ЗАДАНИЕ
НА РАЗРАБОТКУ ТЕХНИЧЕСКОГО СРЕДСТВА КОНТРОЛЯ ЭФФЕКТИВНОСТИ,
БЕЗОПАСНОСТИ И ЭКОЛОГИЧНОСТИ ВОЖДЕНИЯ
ТРАНСПОРТНОГО СРЕДСТВА
П.4.1. Назначение и область применения
Наименование объекта разработки - техническое средство контроля эффективности, безопасности и экологичности вождения транспортного средства (СКВ).
СКВ предназначено для определения уровня умения водителя управлять автомобилем в реальных условиях движения путем сравнения измеряемых показателей качества управления с нормативными значениями этих показателей. Нормативные значения вычисляются на основании предварительно определенных зависимостей этих значений от условий движения в транспортном потоке.
П.4.2. Основные требования к СКВ-1
П.4.2.1. СКВ предназначена для применения на транспортных средствах, двигатели, которых имеют электронное управление впрыском топлива с выходом на бортовой компьютер сигнала, пропорционального расходу топлива, и оборудованных спидометрами с электрическим приводом от датчика Холла.
П.4.2.2. В качестве IT - устройства применяется Netbook, для которого разработана программа вычислений измеряемых и нормативных значений показателей качества управления транспортным средством. Связь с датчиками пути и расхода топлива должна осуществляться по системе Bluetooth. Должно быть предусмотрено сохранение связи Bluetooth при выключении зажигания.
П.4.2.3. Определяемые показатели качества управления транспортным средством, единицы, диапазоны и дискретность отображения показателей на дисплее приведены в табл. 1.
Перечисленные в табл. 1 показатели качества управления, должны быть так же записаны в память Netbook в функции пути и времени.
Алгоритмы вычисления показателей приведены в разделе П.4.3.
П.4.2.4. Подключение Netbook по Bluetooth к каналам связи с датчиками исходной информации, установленными на автомобиле, должно быть максимально автоматизировано.
Пауза в изменении значений показателей качества управления должна включаться и выключаться клавишей "пробел". При включении паузы на дисплее должен появляться знак, сигнализирующий об этом.
Измеряемые показатели качества управления отображаются на дисплее в виде протокола оценки качества учебной поездки, как показано в табл. 2.
П.4.2.5. По результатам измерений, записанных в протокол, должны быть построены графики изменения максимальной скорости Vmax в зависимости от количества проведенных занятий, и зависимости эксплуатационного расхода топлива qs в зависимости от числа проведенных занятий.
Таблица П.4.1. - Перечень измеряемых показателей качества управления транспортным средством
N п/п
Измеряемые параметры
Обозначение
Единица измерения
Диапазон измерения
Дискретность
1.
Средняя скорость сообщения в поездке
Vс
км/ч
0...200
0,1
2.
Максимальная скорость в поездке
Vmax
км/ч
0...150
0,1
3.
Нормативное значение максимальной скорости в поездке <1>
Vmax.н
км/ч
0...150
0,1
4.
Путевой расход топлива в поездке
qs
л/100 км
0...50
0,1
5.
Нормативное значение путевого расхода топлива <2>
qs.н
л/100 км
0...50
0,1
6.
Пробег с начала поездки
![]()
км
0...1000
1
7.
Продолжительность поездки
![]()
ч:мин
0...24 ч
1 мин
--------------------------------
<1> Вычисляется на основании зависимости максимальной скорости Vmax от средней скорости сообщения Vс.
<2> Устанавливается Минтрансом России, его значение вводится Netbook при его настройке.
Таблица П.4.2. - Протокол N _1_ от 12.05.__ 2014_г.
Обучаемый_Иванов_Инструктор_Петров_ ТС_ВАЗ 2115_____
N п/п
Дата
![]()
км
![]()
ч:мин
Vс
км/ч
Vmax
км/ч
Vmax.н
км/ч
qs
л/100 км
qs.н
л/100 км
1
12.05.
34
1:40
20,4
40
50
12
10,0
2.
14.05
34
1:43
19,8
40
50
12,2
10,0
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
21.
22.
23.
24.
П.4.3. Алгоритмы вычисления показателей качества управления
автомобилем и их нормативных значений
П.4.3.1. Определение пути, пройденного автомобилем, пути, проходимого за один оборот колеса
П.4.3.1.1. Путь S, пройденный автомобилем, вычисляется по формуле:
S = ns / ks, км (1)
где
ns - число импульсов при прохождении измеряемого отрезка пути S, км. (При калибровке датчика пути, проходимый путь измерять по одометру автомобиля).
ks - коэффициент преобразования пути, проходимого автомобилем, в импульсы, возникающие при вращении колес, в имп./км;
Величина ks определяется путем калибровки, вводится в СКВ и сохраняется до следующей калибровки.
П.4.3.1.2. Путь, проходимый колесом за один оборот Sоб определяется по формуле:
Sоб = Sимп * nоб, м (2)
где
Sимп = 1000S / ns - путь, проходимый колесом за один импульс, м;
S - путь, пройденный автомобилем, км;
nоб - число импульсов за один оборот колеса.
П.4.3.2. Определение средней скорости сообщения
П.4.3.2.1. Определять скорости сообщения Vс с начала поездки по формуле:
Vс = 3600S / tS, км/ч (3)
где
S - путь, пройденный автомобилем с начала измерения в км с дискретностью 0,001 км;
tS - время в пути с начала измерения в с.
П.4.3.2.2. Определение нормативных значений средней скорости сообщения в поездке.
П.4.3.2.2.1. В качестве нормативного значения средней скорости сообщения в поездке Vс.н принимаются измеренные значение средней скорости сообщения:
Vс.н = Vс км/ч (4)
Вычисленные значения Vс округляются до 0,1 км/ч. Значения Vс начинают выводиться на дисплей поле прохождения первого км пути. Сохранять в памяти результаты измерений в поездке до "обнуления". Записать эти результаты в функции времени и пути в память Netbook.
П.4.3. Определение максимальной скорости в поездке Vmax
П.4.3.1. Определение мгновенного значения скорости автомобиля
Мгновенное значение скорости V определяется путем измерения времени прохождения отрезка пути, соответствующего 15 импульсам, возникающим при вращении колеса, по формуле:
V = 3,6S15 / t15 км/ч (5)
где
V - мгновенная скорость, км/ч;
t15 - время прохождения отрезка пути, соответствующего 15 импульсам.
П.4.3.2. Для определения максимальной скорости в поездке Vmax необходимо измерять мгновенную скорость V каждые 5 с., и на каждом километре пути определять среднюю максимальную скорость Vmax.i по формуле:
Vmax.i = ![]() V / n км/ч (6)
V / n км/ч (6)
где
n - число измерений максимальной скорости на одном км пути.
П.4.3.3. За максимальную скорость в поездке Vmax принимается среднее значение, равное сумме максимальных скоростей на каждом км пути, деленной на отрезок пути S пройденный, пройденный с начала поездки:
Vmax= ![]() Vmax.i / S км/ч (8)
Vmax.i / S км/ч (8)
Вычисленные значения Vmax округляются до 0,1 км/ч. Значения Vmax начинают выводиться на дисплей поле прохождения первого км пути.
П.4.3.4. Определение нормативных значений максимальной скорости
Нормативные значения максимальной скорости Vmax.н в зависимости от величины средней скорости вычисляются по следующим уравнениям:
Vmax.н = 0,964Vс + 30 км/ч, если 0 < Vс. ![]() 27.5 км/ч (9)
27.5 км/ч (9)
Vmax.н = 0,493Vс + 42,93 км/ч, если 27,5 < Vс ![]() 75 км/ч (10)
75 км/ч (10)
Vmax.н = Vс + 10 км/ч, если 75 < Vс. км/ч (11)
Вычисленные значения Vmax округляются до значений, кратных 5 км/ч в сторону наименьшей разницы. Так, например, значения скорости 50,1 - 52,5 км/ч округляются до 50 км/ч, значения скорости 52,6 - 54,9 - до 55 км/ч и т.д.
Сравнение максимальной скорости в поездке Vmax с нормативными значениями производиться после прохождения первых 5 км пути. В дальнейшее сравнение производится при прохождении каждого следующего км пути.
Сохранять в памяти результаты измерений в поездке и ездовых циклах до "обнуления". Записать эти результаты в функции времени и пути в память Netbook.
П.4.4. Определение путевого расхода топлива в поездке
П.4.4.1. Определять путевой расход топлива qs на заданном отрезке пути S, производится по формуле:
qs = 102n / knq S л/100 км (12)
где
nq - количество импульсов расходомера топлива, имп;
knq - коэффициент преобразования импульсов расходомера в расход топлива в имп/л;
S - пробег автомобиля с начала поездки, км.
П.4.4.2. Нормативные величины путевого расхода топлива qs.н определяется в соответствии с методическими рекомендациями Минтранса России "Нормы расхода топлива и смазочных материалов на автомобильном транспорте".
Нормативный расход топлива вводится с клавиатуры Netbook.
Сравнение измеренного расхода топлива с нормативным значением в поездке производить первый раз через 5 км. В дальнейшем - по завершении каждого очередного км пути.
Сохранять полученные результаты в памяти до обнуления. Записать их в память Netbook.
Приложение 5
МЕТОДИКА
ПРИМЕНЕНИЯ СРЕДСТВА КОНТРОЛЯ ВОЖДЕНИЯ ПРИ ОБУЧЕНИИ
И КОНТРОЛЕ КАЧЕСТВА УПРАВЛЕНИЯ АВТОМОБИЛЕМ
В РЕАЛЬНЫХ УСЛОВИЯХ
Умение водителя управлять автомобилем можно представить в виде двух уровней. Первый уровень - наличие навыков регулирования скорости и траектории автомобиля. Второй - умение анализировать дорожную ситуацию и обеспечивать движение со скоростью, ускорением, дистанцией и боковым интервалом, которые соответствуют безопасным значениям, и которые определяют положение границ безопасного управления. Водитель оценивает безопасные значения скорости, ускорения, дистанции и бокового интервала с ошибкой. Основной причиной систематического перехода границ безопасного управления является отсутствие обратной связи, информирующей водителя об этом, и позволяющей ему корректировать свои ошибки.
Когда транспортный поток не является свободным, водитель вынужден двигаться со скоростью потока. В этих условиях повышение эффективности управления автомобилем возможно только путем уменьшения расхода топлива. Действия водителя, направленные на снижение расхода топлива, полностью совпадают с действиями, обеспечивающими безопасное управление. При снижении расхода топлива так же повышается экологичность управления автомобилем. Поэтому обучение экономичному управлению является тем главным звеном в цепи проблем, связанных с управлением автомобилем, потянув за которую мы повысим эффективность, безопасность и экологичность управления автомобилем.
Основой эффективного, безопасного и экологичного управления является оптимальная модель управления автомобилем, сформулированная в разделах 1.1.2.1.2 и 1.1.2.2.
В отсутствие обратной связи, оценку качества управления автомобилем можно сравнить с оценкой прыжков в высоту без планки. Устройство контроля вождения (УКВ), описанное в разделе 1.1.2.9, создает обратную связь и позволяет установить требования к умению водителя управлять автомобилем в инструментально измеряемых показателях качества управления. Наличие инструментально измеряемых показателей качества управления позволяет установить понятные требования качеству управления автомобилем, при выполнении которых водитель может быть допущен к участию в дорожном движении.
Самая совершенная система обучения водителей не может подготовить водителя высокой квалификации. Для этого он должен приобрести опыт и повысить свою квалификацию. Наличие инструментально измеряемых показателей качества управления позволяет создать систему требований к водителям различного уровня мастерства.
Для надежного управления автомобилем, водитель должен находиться в состоянии функционального комфорта. В процессе обучения вождению на дорогах общего пользования кандидат в водители находится в состоянии повышенной психической напряженности. В момент достижения заданного уровня качества управления автомобилем, уровень психической напряженности остается повышенным. Процесс обучения необходимо считать завершенным после того, как уровень психической напряженности снизится до допустимого стресса.
Повышенная психическая напряженность водителя может быть вызвана двумя причинами: недостаточным уровнем навыков регулирования скорости и траектории автомобиля; агрессивным вождением при высоком уровне навыков регулирования скорости и траектории автомобиля.
П.5.1. Требования к качеству управления автомобилем
Обучение кандидата в водители должно продолжаться до наступления следующих событий: обучаемый должен освоить оптимальную модель управления автомобилем, уметь ездить в свободном транспортном потоке с разрешенной скоростью, расход топлива не должен превышать установленного норматива, установленного Минтрансом России.
Завершению повышения квалификации водитель должно соответствовать следующие события: при управлении автомобилем реализуется оптимальная модель, расход топлива должен снизиться на 15...20%.
П.5.2. Требования к учебным маршрутам
Для обучения кандидатов в водители вождению автомобиля по дорогам общего пользования, необходимо применять несколько маршрутов возрастающей сложности. Сложность маршрутов должна определяться выполняемыми маневрами. Самый простой маршрут не должен включать левых поворотов и разворотов. Усложнение маршрута должно достигаться за счет включения поворотов и разворотов, требующих перестроения из ряда в ряд, выполнения обгонов и опережений.
Маршруты для проведения занятий по повышению квалификации водителей необходимо выбирать так, чтобы они включали движение в населенном пункте, движение вне населенного пункта по двухполосной и, при наличии возможности, по четырехполосной и многополосной дорогам.
П.5.3. Порядок проведения занятий
На первом этапе обучения вождению по дорогам общего пользования (на самом простом маршруте) необходимо постепенно повышать максимальную скорость на участках свободного движения с 40 до 60 км/ч. При переходе на более сложные маршруты необходимо стремиться к тому, чтобы обучаемый ехал со скоростью транспортного потока.
При проведении занятий по повышению квалификации водителей необходимо сразу же ставить задачу ехать со скоростью транспортного потока.
П.5.4. Контроль успешности учебного процесса
С первого занятия на дорогах общего пользования как с кандидатами в водители, так и водителями с помощью СКВ контролируется качество управления. При обучении кандидатов в водители на первых занятиях перед обучаемым, не ставится задача достичь определенного качества управления. В то же время, после завершения занятия, его необходимо проинформировать о полученных результатах и сравнить их нормативами.
Необходимо анализировать изменение показателей качества управления от занятия к занятию. Наличие такой информации позволит обучаемому увидеть свои успехи и неудачи, и предоставит инструктору возможность объяснить их причины.
После того, как обучаемый начнет двигаться со скоростью транспортного потока, необходимо перейти к освоению экономичного алгоритма управления автомобилем. На начальном этапе инструктор должен подсказывать моменты переключения передач при разгоне, выбор передачи при установившемся движении, целесообразность перехода к движению накатом. По мере приобретения обучаемым умения, подсказки должны заменяться контролем. Каждое занятие должно завершаться разбором достигнутых результатов и допускаемых ошибок.
Результаты измерений должны заноситься в протокол. На основании полученных данных о качестве управления. Форма протокола приведена в табл. П.5.1. На основании зафиксированных в протоколе данных рекомендуется строить графики обучения, описывающие изменение максимальной скорости Vmax и отношения расхода топлива к нормативу kqq в зависимости от количества занятий.
Таблица П.5.1. - Протокол N _1_ от 12.05.__ 2014_ г.
Обучаемый_Иванов_ Инструктор_Петров_ ТС_ВАЗ 2115_______
N п/п
Дата
![]()
км
![]()
ч:мин
Vс
км/ч
Vmax
км/ч
Vmax.н
км/ч
qs
л/100 км
qs.н
л/100 км
1
12.05.
34
1:40
20,4
40
50
12
10,0
2.
14.05
34
1:43
19,8
40
50
12,2
10,0
3.
4.
5.
6.
7.
8.
9.
10.
Занятия по повышению квалификации водителей должны начинаться с тестовой поездки для оценки уровня квалификации водителя. После этого необходимо провести теоретическое занятие на тему: "Основы эффективного, безопасного и экологичного управления" автомобилем и проанализированы результаты тестовой поездки. При проведении тренировочных заездов инструктор должен подсказывать моменты переключения передач при разгоне, выбор передачи при установившемся движении, целесообразность перехода к движению накатом. По мере приобретения обучаемым умения, подсказки должны заменяться контролем. В процессе поездки инструктор периодически должен информировать водителя о величине расхода топлива в сравнении нормативом. При этом необходимо так же объяснять за счет чего необходимо снизить расход топлива. Занятия целесообразно проводить до тех пор, пока расход топлива снизится на 15...20%.